As some of you may be aware, from our most recent buildout of the new committee area, Romeo has agreed to permit me to pilot (as in trial) a new use case in the Aerospace area. I’ll be bringing in, and setting up, a UAV simulator station.
The simulator consists of a computer, a flight simulator, a ground control station application, some other parts, and an actual UAV flight controller that runs actual flight code that has been stubbed off to get its inputs from a Physics-based flight simulator, rather than from onboard sensors. The flight controller will simultaneously control it’s virtual control surfaces and, for demo purposes, it will control physical control surfaces. These will consist of some type of mock aircraft (we could swap in different physical models, make new ones with the printers or laser cutter, or woodshop, etc… any one want to build an aircraft? Anything will work, so long as it has servo input for control surfaces for yaw, roll, and pitch)
Using this setup, we can allow any member to:
- see a UAV and it’s major components, in “flight” close up
- casually take command of a UAV, safely, without placing people or gear at risk, and without FAA approval
- learn to program, configure, or tune a UAV
- learn how to mis-tune a UAV, and observe the results
- test mission plans
- test a payload or payload triggering in a safe® manner than actually putting it in the air
- just watch the aircraft fly through it’s virtual world without the burden of learning anything
- many other fun and educational things
I just wanted to provide a quick status on this project.
(done) approval - provisional committee approval for the project (table space and the ok to bring it all in and demo it)
(done) proof-of-concept - I have re-validated the concept by demonstrating hardware-in-the-loop simulation with the flight controller using the latest versions of code from ArduPilot/ArduPlane and Mission Planner.
(done) virtual model - I previously made a virtual model of a UAV (based on an EasyStar/Bixler RC aircraft, modified for autonomous operation, with sensor payload) This model has been used by several UAV research teams around the world, and is listed as the recommended model by the Pixhawk project from ETH Zurich. We can load other models, but this is the one I’ll start with.
(done) physical controls - I’ve modified the UAV to permit it to control physical servos in addition to virtual, and re-wired the physical hardware to support AC power for sustained operations
(done) Software Licensing - The Flight Simulator software license comes in two forms, professional, appropriate for public, multi-user, and commercial applications, and single user, private, home use. I obtained a written approval permitting the home use license to be used at DMS. Since I’m purchasing and placing on loan almost all the software, hardware, and parts for this project, that doesn’t much matter to DMS, but it allowed me to do the project at all…
(done) Software - I have purchased the flight sim software - I already own it, of course, but this is a copy I’ll donate to DMS Aerospace, for use on this application, and for future use beyond this application - and the software has arrived
(In progress) Aquire hardware - I have the Flight controller, and I have a PC on order, expected to arrive sometime next week. I have the servos, power supplies, and power strip needed. We will need to source some monitors, at least two, but we can support four or more. We will also need some mock airplane with movable control surfaces, into which we’ll install the servos and flight controller.
I’m targeting an initial setup/demo of the system when I have the gear that I’ll need to leave at DMS, and I’m expecting that sometime late next week.
Questions, comments, suggestions? Volunteers to help with the setup, or to design, print, cut, assemble mock aircraft frames?
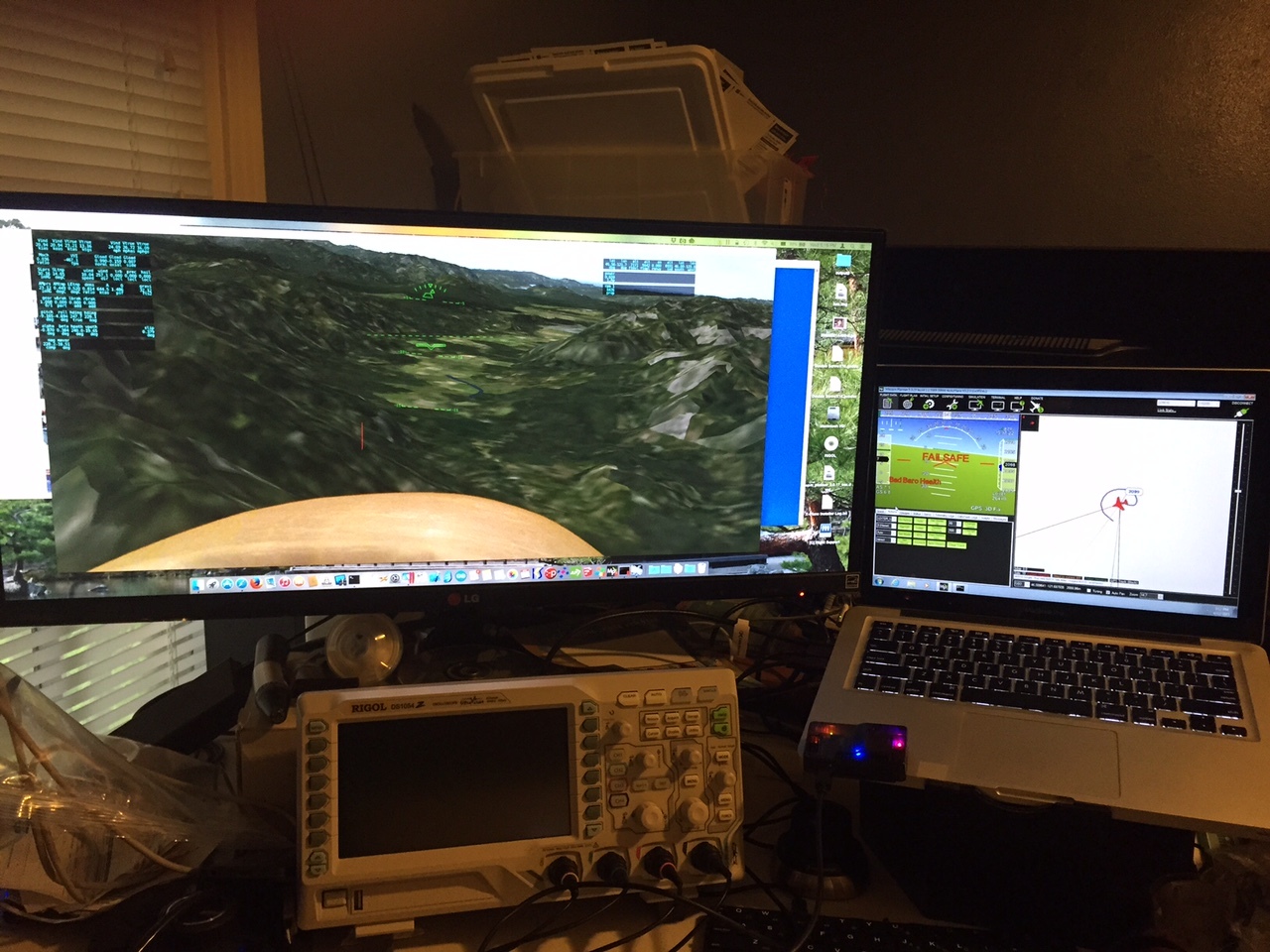
Now a photo of a UAV Flight Controller commanding a virtual plane. When I have the rest of the gear, this will be a lot more interesting, but it’s a sample, without the servos or plane model, and shows it working.